Biomechanics Research Unit,College of Engineering,NIHON UNIVERSITY
〒963-8642 福島県郡山市田村町徳定字中河原1 10号館106号室,107号室
2024年度 JKA補助事業
Rabbit Modelによる協働型ロボットの安全基準導出-SDGs第8目標への貢献
| 背景 協働型ロボットや生活支援ロボットが普及することにより,危険または単純な作業をロボットに代替させ,人間は安全かつより高度な労働に従事することが期待される.これにより,SDGsの第8目標「働きがいも経済成長も」の達成を目指す.これらのロボットは人間と同一空間で稼働するため,接触による傷害のリスクを低減する設計が必要である.設計時に参照すべき安全基準の策定が進められている. |
 |
| 目的 傷害を受ける可能性が高い部位として,人間の手指に着目した.協働型ロボットの可動部との接触による手指の皮膚傷害に関する安全基準を導出することが,本研究の目的である. |
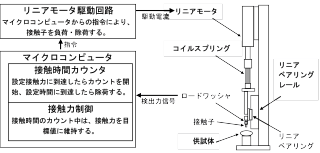
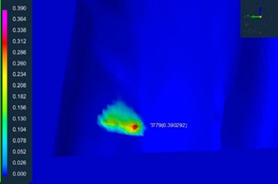
| 方法 実験装置を開発して,皮膚の挫創発生の有無を調べた.この装置では,ウサギの下腿で人間の手指を代替し,クサビ型の接触子を接触させる.マイクロコンピュータによって,接触力と接触時間を制御した.実験は,日本大学動物実験委員会の承認(AP22CEB002-1,AP25CEB001-1)を受けて実施した. また,限られた数の実験結果を補完を可能にするために,傷害発生過程のコンピュータシミュレーションモデルを開発した.皮膚,筋,骨を個別の特性を有する要素で構成し,有限要素法で接触時の力の分布を計算した. |
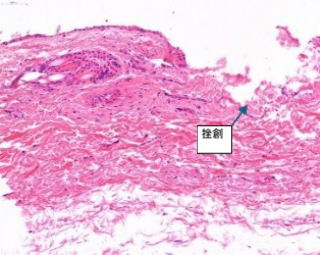
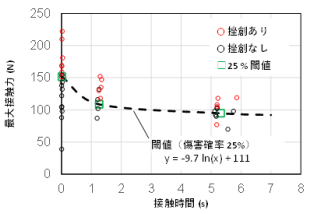
| 結果 実験により,接触子と骨に挟まれた領域の皮膚に挫創が発生した.条件を変化させた実験の結果から,接触時間が長い場合には低い接触力でも皮膚の挫創が発生することが確認された.この結果から,25%の確率で挫創が発生する条件(閾値)を求めるめることで,安全基準のベースとなるデータをまとめた. また,コンピュータシミュレーションの結果,接触子と骨に挟まれた領域(下の図の赤い部分)の皮膚が挫創に至る過程が再現された. |